

Ein mit Sonden-Daten erstellte Ansicht des Grabenbruchsystems Vales Marineris auf dem Mars (Illu.).
Copyright/Quelle: Kevin Gill (via WikimediaCommons) CC BY-SA 2.0
Würzburg (Deutschland) – Die geplante deutsche Mars-Mission VaMEx nimmt weiter Formen an. Forschende der Professur für Raumfahrttechnik der Universität Würzburg sind daran mit einem nun vom Bund geförderten Projekt zur Erkundung von Höhlen im Canyon Valles Marineris und erstmals auch mit der Suche nach unidentifizierten Phänomenen (UAP) am Mars-Himmel beteiligt.
– Lesen Sie hierzu auch das exklusive GreWi-Interview, in dem Prof. Hakan Kayal die UAP-Aspekte von „VaMEx 3 – MarsSymphony“ erläutert.
3.000 Kilometer lang, 600 Kilometer breit und bis zu acht Kilometer tief, erstreckt sich das gewaltige Mars-Tal Valles Marineris als eine der markantesten Oberflächenstrukturen über den Roten Planeten.
Gewaltiger Mars-Canyon im Visier
Valles Marineris steht aktuell auch im Fokus der Forschungsinitiative des Deutschen Zentrums für Luft- und Raumfahrt (DLR) mit dem Arbeitstitel „VaMEx“ (Valles Marineris Exploration). Ziel dieser anvisierten deutschen Mars-Mission ist es, das Grabenbruchsystem zu erforschen und nach Spuren von Leben zu suchen. Dafür will das DLR einen Schwarm autonomer, untereinander vernetzter Roboter auf den Mars bringen. Diese sollen sowohl auf der Oberfläche, in Höhlen, aber auch aus und in der Luft agieren, Aufnahmen und Messungen erstellen und weitere Daten sammeln.

Blick auf den Mars mit seiner markanten Narbe, dem gewaltigen Grabenbruchsystem Vales Marineris. Dieses steht im Fokus der geplanten deutsche Mars-Mission „Valles Marineris Exploration“ (VaMex).
Copyright: NASA
Besonders Höhlen sind nicht nur interessante Standorte für Mond- oder Marsbasen, in ihren Schutzräumen herrschen vermutlich auch günstige Bedingungen für die Entstehung und den Schutz von Leben vor kosmischer Strahlung und extremen Temperaturen.
An der anvisierten Erforschung des Valles Marineris im Rahmen der VaMEx-Mission ist auch ein Team der Professur für Raumfahrttechnik an der Julius-Maximilians-Universität Würzburg (JMU) beteiligt. Seine Aufgabe ist es, ein Kommunikationskonzept für den Roboterschwarm zu entwickeln. Mit Mitteln des Bundesministeriums für Wirtschaft und Klimaschutz fördert das DLR auch das VaMEx-3-Teilprojekt „MarsSymphony“ an der JMU mit rund 1,5 Millionen Euro (Förderkennzeichen 50RK2451A).
Ein Sensor- und Datennetzwerk für den Mars
„Wir haben unserem Teilprojekt den Namen „VaMEx 3 – MarsSymphony“ gegeben, weil es darum geht, die einzelnen Elemente des Roboterschwarms wie ein Orchester harmonisch zusammenspielen zu lassen“, erklärt Projektleiter Professor Hakan Kayal. „Zum Schwarm gehören mobile Roboter in der Luft und zu Land, ein stationäres Gateway am Boden, das als Kommandozentrale für die Kommunikation dient, und ein Satellitensimulator für den Datenaustausch mit der Erde.“
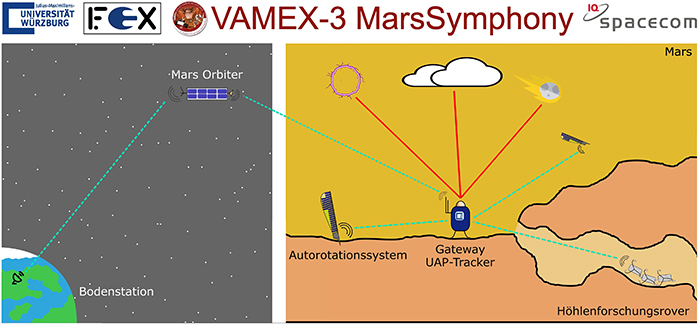
Vereinfacht dargestellte Konzeption des Roboterschwarms zur Erforschung des Valles Marineris auf dem Mars (Illu.). Klicken Sie auf die Bildmitte, um zu einer vergrößerten Darstellung zu gelangen.
Quelle/Copyright:Cemens Riegler, Universität Würzburg
Wenn die Roboter am Boden in Höhlen vordringen, sind sie von der Marsoberfläche abgeschirmt und können nicht direkt mit dem Gateway und dem Orbiter kommunizieren. Zum Konzept gehören darum auch Repeater-Stationen, welche die aufgenommenen Bilder und Daten in einer Transportkette weiterreichen – vom Roboter in der Höhle bis zum Gateway an der Oberfläche des Planeten.
Trudelnde Drohnen wie Ahornsamen
Teil des Schwarms sind außerdem sogenannte Autorotationskörper. Sie werden aus der Luft abgeworfen und sammeln Daten, während sie sanft zu Boden gleiten. Letzteres schaffen sie dank ihres speziellen Designs: Die länglichen Körper sind wie Ahornsamen gebaut. Sie haben einen Flügel und drehen sich um ihre eigene Achse, was sie sachte abwärts trudeln lässt. Ihr Flugweg ist steuerbar, sodass man sie gezielt über eine größere Fläche verteilen und sie dann als Sensor- oder Repeater-Netzwerke nutzen kann.
www.grenzwissenschaft-aktuell.de
+ HIER können Sie den täglichen kostenlosen GreWi-Newsletter bestellen +
Über den Einsatz der Autorotationskörper freut sich MarsSymphony-Projektmanager Clemens Riegler ganz besonders: Er hat die Fallkörper noch als Student mitentwickelt – ab 2016 im Rexus-Bexus-Programm des DLR und in der Würzburger Hochschulgruppe WüSpace e.V., der Studierenden die Mitarbeit an Projekten der Luft- und Raumfahrt ermöglicht. In seiner Doktorarbeit entwickelt Riegler die Fallkörper weiter: „Es ist sehr schön zu sehen, dass das DLR diese Arbeit würdigt und sie jetzt Teil eines Projekts zur Erkundung des Mars geworden ist!“
All-Sky-Kamera sucht am Mars-Himmel nach bekannten und unbekannten Phänomenen
Das robotische Mars-Orchester beinhaltet zudem eine weitere einzigartige Besonderheit: Das stationäre Gateway wird mit einer Kamera ausgestattet, die den Himmel des Mars im Blick behält. „Alle bisherigen Mars-Missionen haben sich auf die Oberfläche des Planeten konzentriert, wir wollen erstmals auch nach oben schauen“, sagt Hakan Kayal. Und dort dürfte es einiges zu beobachten geben: Wolkenbildung, Eintritte von Meteoren oder Blitze und andere kurzzeitige Phänomene.
Meteoriten von der Größe eines Basketballs schlagen auf dem Mars fast täglich ein: Das hat ein internationales Forschungsteam erst im Juni 2024 aus seismischen Daten geschlossen. „Wir könnten das mit Daten weiter untermauern, wenn wir mit unserer UAP-Kamera den Eintritt von Meteoriten filmen und diese Ereignisse mit den seismischen Signalen korrelieren“, sagt Hakan Kayal.
Doch das Himmelsauge soll nicht nur Mars-Meteore dokumentieren: Die Abkürzung UAP (früher UFO) steht für „Unidentified Anomalous Phenomena“, zu Deutsch „unidentifizierte anomale Phänomene“. Der Name der Kamera leitet sich von ihrer Fähigkeit ab, mittels künstlicher Intelligenz (KI) gezielt unbekannte Himmelsphänomene aufzuspüren, wie sie auch auf der Erde beobachtet werden. „Die Integration eines Kamerasystems zur Himmelsbeobachtung auf dem Gateway stellt einen wesentlichen Entwicklungsschritt hin zu einem Detektionssystem für Kurzzeitphänomene in der Marsatmosphäre sowie zur Erforschung von UAPs dar. Die neuartige Himmelsbeobachtungskamera könnte in Zukunft also auch auf dem Mars UAPs detektieren“, erklärt Kayal.
UAP-Kamera für den Mars hat irdische Vorbilder
Das UAP-Kamerasystem für den Mars basiert auf bereits von Kayal und Kollegen entwickelten ähnlichen Systemen, die mit Hilfe von KI im norwegischen Hessdalen und auf dem Dach des Unicampus in Würzburg natürliche und konventionelle Flugobjekte von unbekannten und anomalen Phänomenen unterscheiden und letztere detektierten und dokumentieren sollen.

Das Stereo-Kamerasystem auf dem Dach des JMU-Campus in Würzburg.
Quelle: JMU/IFEX
Sogar an Bord eines Kleinstsatelliten haben die Forschenden der JMU ein KI-basiertes Kamerasystem bereits erfolgreich auf einer Erdumlaufbahn platziert, mit dem zwar keine UAP, dafür aber nach anomalen Oberflächenstrukturen auf Planeten und anderen Himmelskörpern gesucht werden kann (…GreWi berichtete).

Eine von der KI-Kamera an Bord von Sonate-2 als Anomalie erkannte künstliche Insel.
Copyright: A. Müller für grenzwissenschaft-aktuell.de
Professor Kayals „Interdisziplinäres Forschungszentrum für Extraterrestrik“ (IFEX) an der JMU ist zudem weltweit das einzige universitäre Forschungszentrum, an dem UAP ganz offiziell innerhalb des Forschungskanons der Universität erforscht werden (…GreWi berichtete https://www.grenzwissenschaft-aktuell.de/universitaet-wuerzburg-nimmt-uap-ufos-in-forschungskanon-auf20220208/). Mit der „MarsSymphony“ fördert der Bund auch erstmals ein wissenschaftliches Projekt mit einem klar auch als solchen benannten Bezug zu unidentifizierten anomalen Phänomenen im Luftraum (UAP).
– Lesen Sie hierzu auch das exklusive GreWi-Interview, in dem Prof. Hakan Kayal die UAP-Aspekte von „VaMEx 3 – MarsSymphony“ erläutert.
Schon im Laufe des Jahres 2025 soll nun bei einer sogenannten Analogmission in einem irdischen Steinbruch getestet werden, ob der Roboterschwarm wie geplant funktioniert. Auch bei dieser Simulation spielt die Würzburger UAP-Kamera dann eine wichtige Rolle: Ihre Videoaufnahmen vom Himmel liefern ausreichend große Datenvolumina, um die Belastbarkeit des Kommunikationssystems zu testen.
Läuft die Analogmission gut, soll ein mögliches Nachfolgeprojekt die Hardware an die Bedürfnisse für einen Einsatz auf dem Mars angepasst werden, da dort harsche Bedingungen vorherrschen, denen die Instrumente standhalten müssen: Die Atmosphäre ist dünn, die Durchschnittstemperatur liegt bei minus 63 Grad Celsius und regelmäßig fegen große Staubstürme über die Planetenoberfläche.
Recherchequellen: IFEX/JMU, eigene Recherchen grenzwissenschaft-aktuell.de
© grenzwissenschaft-aktuell.de




