Ingenieure konzipieren Roboter mit maschineller Selbsterkenntnis
Copyright: Comfreak (via Pixabay.com) Oxabay License
New York (USA) – Sich selbstbewusste Roboter sind seit Jahrzehnten Inhalt von Science-Fiction. Jetzt sind US-Ingenieure dieser Vision vielleicht ein Stück näher gekommen und haben einen Roboter entwickelt, der in der Lage ist – ohne vorherige Informationseingabe und Kenntnisse in Physik, Geometrie und Motordynamik – zu lernen, was er selbst ist. Ein erster Schritt hin zu sich selbst bewussten Robotern?
Wie das Team um Professor Hod Lipson und sein Doktorand Robert Kwiatkowski von der Columbia University aktuell im Fachjournal „Science Robotics“ (DOI: 10.1126/scirobotics.aau9354) berichtet, habe der Roboter zunächst keine Ahnung von seiner eigenen Form und Funktion. Doch schon innerhalb eines Tages intensiven Berechnens erstellt der Roboter eine Selbstsimulation, mit der er verschiedene Situationen betrachten und sich anpassen, neue Aufgaben erledigen sowie Schäden erkennen und sich selbst reparieren kann.
„Als einziges Wesen auf der Erde, ist der Mensch in der Lage, sich sich selbst vorzustellen, sich in zukünftigen Szenarien vorzustellen – etwa an einem warmen, sonnigen Tag am Strand entlang zu gehen“, erläutert Lipson und führt dazu weiter aus. „Menschen können auch lernen, indem sie vergangene Erfahrungen wieder aufgreifen und darüber nachdenken, was richtig oder falsch gelaufen ist. Während sich also Menschen und bis zu einem bestimmten Grad auch einige Tiere im Laufe ihres Lebens ihr Selbstbild aneignen und anpassen, lernen die meisten Roboter immer noch ausschließlich mit Hilfe von Informationen, Daten, Simulatoren und Modellen, die vom Menschen bereitgestellt werden, oder durch langwierige, zeitaufwändige Versuche und Irrtümer. Roboter haben nicht gelernt, sich so zu simulieren, wie Menschen es tun.“
www.grenzwissenschaft-aktuell.de
+ HIER können Sie den täglichen kostenlosen GreWi-Newsletter bestellen +
Der jetzt von dem Team um Hod Lipson entwickelte Roboter, stellt somit einen großen Fortschritt in der Robotik dar. „Wenn wir möchten, dass Roboter unabhängig werden, um sich schnell an Szenarien anzupassen, die ihre Entwickler nicht vorausgesehen haben, müssen sie unbedingt lernen, sich selbst zu simulieren“, sagt Hod Lipson.
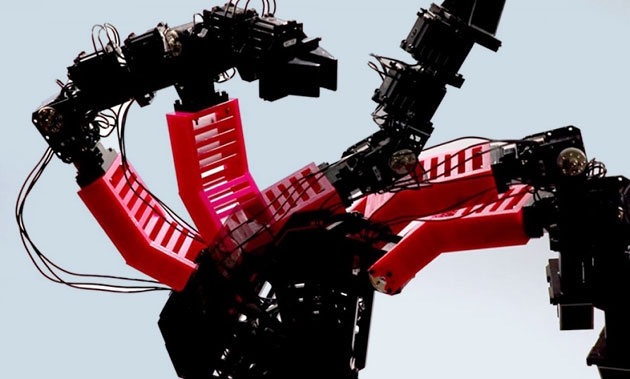
Copyright: Robert Kwiatkowski / Columbia Engineering
Grundlage des Roboters ist ein beweglicher Roboterarm (s. Abb.) mit vier Freiheitsgraden. Den Selbsterkennungsprozess beschreiben die Forscher wie folgt: „Anfangs bewegte sich der Roboter zufällig und sammelte ungefähr eintausend Bewgungsbahnen mit jeweils einhundert Punkten. Der Roboter verwendete dann sogenanntes Deep Learning, eine moderne maschinelle Lernmethode, um ein Modell von sich selbst zu erstellen. Die ersten Selbstmodelle waren zunächst noch ziemlich ungenau und der Roboter wusste nicht, was er war oder wie seine Gelenke miteinander verbunden waren. Doch schon nach weniger als 35 Stunden Training wurde das Selbstmodell mit dem physischen Roboter immer genauer. Durch wiederholende Bewegungsaufgaben in einem System mit geschlossenem Regelkreis, konnte der Roboter seine ursprüngliche Position zwischen jedem Schritt entlang der Bewegungsbahnen auf der Grundlage des internen Selbstmodells neu kalibrieren. Mit der Einstellung konnte der Roboter Objekte an bestimmten Stellen am Boden erfassen und mit 100 Prozent Erfolg in einen Behälter ablegen.
Selbst in einem sog. Open-Loop-System, bei dem eine Aufgabe vollständig auf dem internen Selbstmodell basiert und keine externe Rückmeldung erfolgt, konnte der Roboter die Bestückungsaufgabe mit einer Erfolgsquote von 44 Prozent abschließen. „Das ist, als würde man versuchen, ein Glas Wasser mit geschlossenen Augen aufzunehmen, ein Prozess, der selbst für Menschen schwierig ist“, erläutert Kwiatkowski.
Der Selbstmodellierungsroboter wurde auch für andere Aufgaben verwendet, beispielsweise für das Schreiben von Text mithilfe einer Markierung. Um zu testen, ob das Selbstmodell einen Schaden an sich selbst erkennen kann, druckten die Forscher einen deformierten Teil des Roboterarms mit Hilfe von 3D-Druck, um so den Schaden zu simulieren. Das Ergebnis: „Der Roboter konnte die Veränderung erkennen und sein eigens erstelltes Selbstmodell neu trainieren. Durch das neue Selbstmodell konnte der Roboter seine Bestückungsaufgaben mit geringem Leistungsverlust wieder aufnehmen.“
Zum Thema
Für Lipson und Kollegen ist die Selbstabbildung der Schlüssel dazu, dass Roboter sich von den Grenzen der sogenannten „schmalen KI“ hin zu allgemeineren Fähigkeiten bewegen können. „Dies ist vielleicht das, was ein neugeborenes Kind in seiner Wiege macht, denn es lernt, was es ist. Wir vermuten, dass dieser Vorteil möglicherweise auch der evolutionäre Ursprung des Selbstbewusstseins beim Menschen war. Während die Fähigkeit unseres Roboters, sich selbst vorzustellen, im Vergleich zum Menschen immer noch grob ist, glauben wir, dass diese Fähigkeit auf dem Weg zur maschinellen Selbstwahrnehmung ist.“
Lipson glaubt, dass Robotik und Künstliche Intelligenz (KI) einen neuen Blick auf das uralte Rätsel des Bewusstseins erlauben können. „Philosophen, Psychologen und Kognitionswissenschaftler haben sich seit Jahrtausenden mit dem Bewusstsein der Natur auseinandergesetzt, sind dabei aber vergleichsweise wenig vorangekommen. Roboter zwingen uns jetzt aber, diese vagen Vorstellungen in konkrete Algorithmen und Mechanismen zu übersetzen.“
Zugleich sind sich Lipson und Kwiatkowski der ethischen Implikationen ihrer Arbeit bewusst: „Das Selbstbewusstsein führt zu widerstandsfähigeren und anpassungsfähigeren Systemen, bedeutet aber auch einen gewissen Kontrollverlust. Es ist eine leistungsstarke Technologie, die jedoch mit Vorsicht gehandhabt werden sollte.“
Die Forscher untersuchen nun, ob Roboter nicht nur ihren eigenen Körper modellieren können, sondern auch ihre eigenen „Gedanken“- also, ob Roboter auch darüber und über sich selbst nachdenken können.
WEITERE MELDUNGEN ZUM THEMA
Studie: Maschinen können bald moralisches Verhalten von Menschen imitieren 11. Juli 2017
© grenzwissenschaft-aktuell.de