

Innovative Zeppelin-Drohne könnte verborgene Hohlräume in der Cheopspyramide erkunden
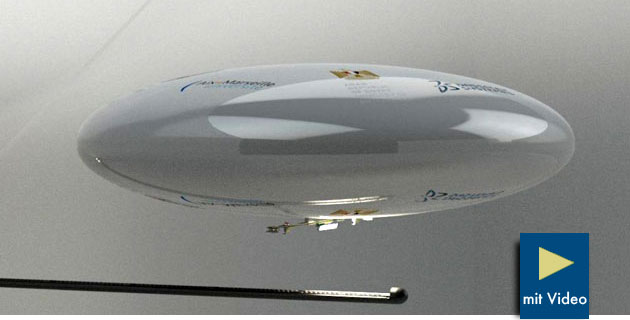 Computeranimation der Zeppelin-Drohne (Illu.).
Computeranimation der Zeppelin-Drohne (Illu.).
Copyright: ScanPYramids / Inria
Nancy (Frankreich) – Seit dem Nachweis eines bislang unbekannten „großen Hohlraums“ im Innern der auch als Cheopspyramide bezeichneten Großen Pyramide von Gizeh (…GreWi berichtete), steht die Frage im Raum, wie dieser Hohlraum eventuell auch direkt erkundet werden könnte, um festzustellen, um was genau es sich dabei handelt. Französische Ingenieure haben sich nun mit dem Forscher- und Wissenschaftlerteam der ScanPyramids-Mission zusammengetan und Pläne für einen innovativen Roboter zur „minimal-invasiven Erkundung“ vorgestellt.
„Derzeit gibt es zwar noch keine konkreten Pläne, diesen Roboter in einem konkreten historischen Monument einzusetzen, es ist aber an der Zeit für genau diese Entwicklung und Umsetzung“, erläutert Jean-Baptiste Mouret, Forscher vom französischen nationalen Forschungsinstitut „Inria“ in einer Presseerklärung.
Gemeinsam mit dem „Lorraine Research Laboratory in Computer Science and ist Applications“ (LORIA) haben sich Mouet und Kollegen mit dem ScanPyramids-Team um Mehdi Tayoubi vom Heritage Innovation Preservation Institute (HIP) zusammengetan um einen Erkundungsroboter zu entwickeln, der mit möglichst geringem Schaden verborgene bzw. unzugängliche Kammern, Räume und offene Strukturen erkunden kann.
www.grenzwissenschaft-aktuell.de
+ HIER können Sie den täglichen GreWi-Newsletter bestellen +
Der von den Forschern und Technikern um Tayoubi und Kunihiro Morishima von der japanischen Nagoya University entdeckte Hohlraum von 3 bis 8 x 30 Metern würde sich für eine solche minimal-invasive Erkundung natürlich geradezu anbieten. Nicht zuletzt weil Archäologen wie der einstige Antikenminister Ägyptens, Zahi Hawass behaupten, hierbei könne es sich gar nicht um eine archäologische Entdeckung, sondern lediglich bekannte Hohlräume handeln, die zu Konstruktionszwecken hinterlassen wurden. Tatsächlich entsprechen die Maße des vom ScanPyramids-Team derzeit noch vorsichtig nur als „Big Void“ (Großer Hohlraum) bezeichneten Struktur denen der sogenannten Großen Galerie und damit einem der beeindruckendsten architektonischen und symbolischsten Bauelemente der Großen Pyramide überhaupt (…GreWi berichtete). Auch unmittelbar hinter dem einstigen Pyramideneingang in der Nordseite und an der oberen nordöstlichen Kante der „Cheopspyramide“ hatte ScanPyramids bereits zuvor zwei weitere unzugängliche Hohlräume gefunden , die bislang noch nicht weiterführend und direkt erkundet werden konnte (…GreWi berichtete).
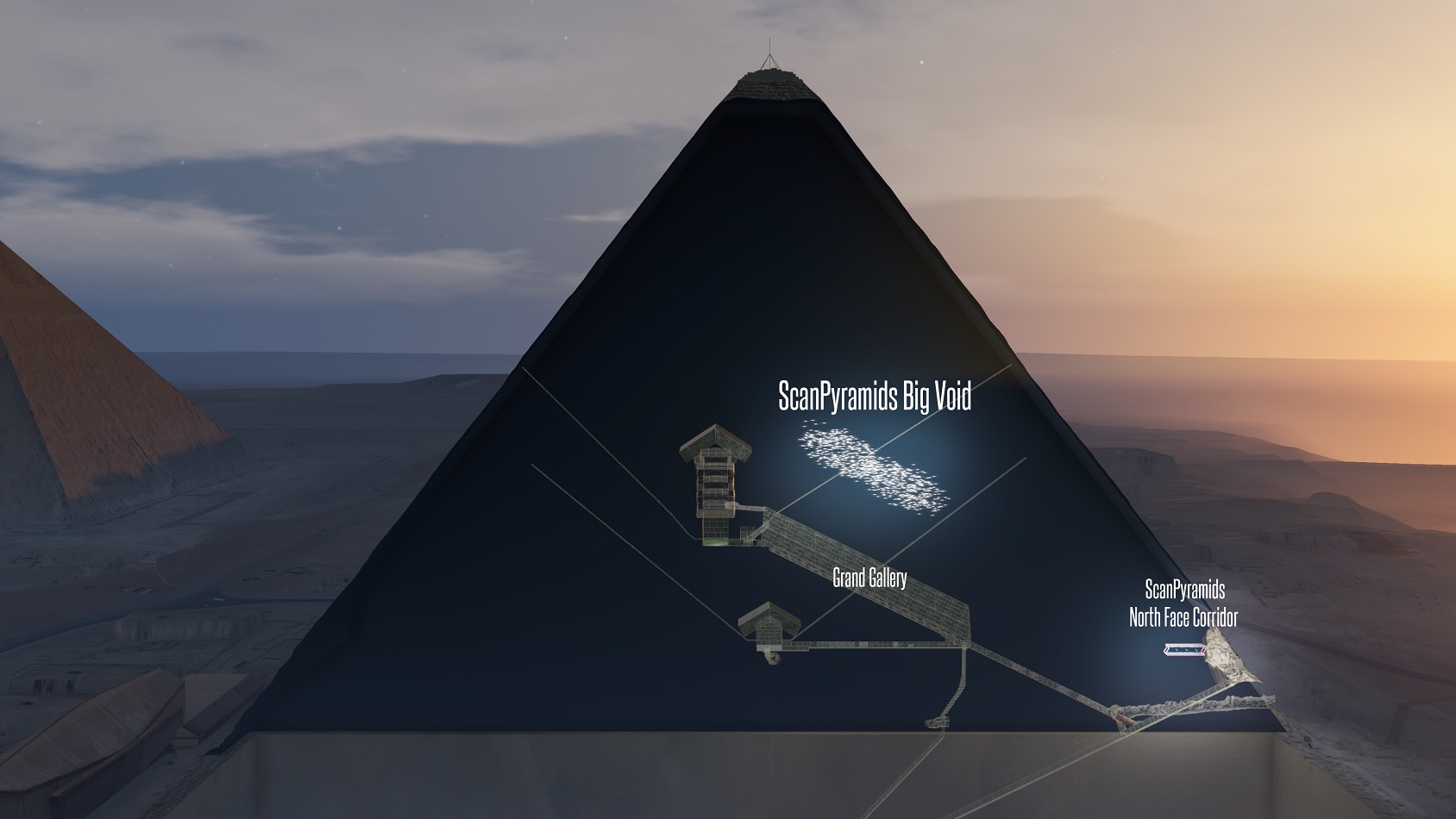
Grafischer Querschnitt durch die „Cheopspyramide“ mitsamt der von ScanPyramids neuentdeckten Hohlräume (Illu.).
Klicken Sie auf die Bildmitte, um zu einer vergrößerten Darstellung zu gelangen.
Copyright: ScanPyramids.com
Zur Erkundung verborgener Hohlräume und Kammern benötigt das jetzt von den französischen Ingenieuren und Wissenschaftlern vorgestellte System lediglich ein gerade einmal 3,5 Zentimeter durchmessendes Bohrloch. Durch ein entsprechend großes und langes Rohr soll dann in einem ersten Schritt eine hochauflösende Miniaturkamera geführt werden, um erste Bilder von der Situation hinter den den Hohlraum verbergenden Mauern zu liefern. In einer zweiten Phase soll dann ein sich im Innern des Hohlraums entfaltender und aufblasender Miniatur-Zeppelin den Hohlraum ferngesteuert erkunden und weitere Aufnahmen und Daten aus dem Innern des Hohlraums liefern.
[video_player type=“youtube“ youtube_show_title_bar=“Y“ style=“1″ dimensions=“560×315″ width=“560″ height=“315″ align=“center“ margin_top=“0″ margin_bottom=“20″ ipad_color=“black“]aHR0cHM6Ly95b3V0dS5iZS9Ld2lyYTg1d0gwWQ==[/video_player]
Auf diese Weise wären eventuell vorhandene Blockaden wie Objekte, Stufen oder Kanten, die den bisherigen fahrenden oder kriechenden Sonden im Wege sein könnten, kein Hindernis mehr. Auch ermöglich eine fliegende Sonde Perspektiven, die so nicht mit bisherigen Technologien möglich wären. Zugleich bestünde aufgrund der Leichtigkeit des Luftschiffes selbst auch deutlich weniger Schädigungsgefahr für mögliche Objekt im Innern der zu erkundenden Struktur, während die Stabilität der Sonde selbst und ihrer Flugmanöver gewahrt bliebe. Danach soll die etwa 80 Zentimeter große Zeppelin-Drohne dann wieder durch das Rohr zurück, den Hohlraum verlassen (s. Video).
© grenzwissenschaft-aktuell.de













